Skip to main content
Search
Search This Blog
Codex Technicanum
We have no idea what that means.
Home
The Scientists
Credentials
More…
Posts
Showing posts from November, 2015
Show all
Posted by
Frogee
November 04, 2015
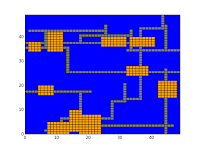
Procedural content generation: map construction via blind agent (a.k.a. building a Rogue-like map)
Posted by
Frogee
November 03, 2015
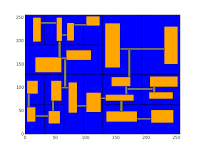
Procedural content generation: map construction via binary space partitioning (a.k.a. building a Rogue-like map)
Newer Posts
Older Posts
Home