Skip to main content
Search
Search This Blog
Codex Technicanum
We have no idea what that means.
Home
The Scientists
Credentials
More…
Posts
Showing posts from August, 2016
Show all
Posted by
Frogee
August 22, 2016
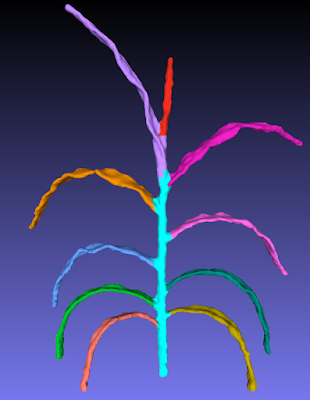
Postmortem: 3D sorghum reconstructions from depth images identify QTL regulating shoot architecture
Newer Posts
Older Posts
Home